Graduation theses
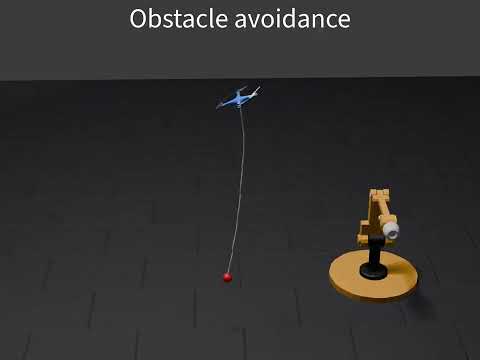
Nonlinear predictive control of the continuum and hybrid dynamics of a suspended deformable cable for aerial pick and place
Duration: Fall 2024 - Summer 2025
For my master's thesis, I developed a four-part control framework:
- a hybrid PDE-based model of a deformable cable suspended from a UAV, with a possible load at the distal end;
- a reduced-order model (ROM) capturing the dominant dynamics;
- a hybrid MPC based on the ROM to control the UAV-cable-load system;
- a planner that exploits the ROM to generate feasible trajectories under dynamic and state constraints.
Implementation on FPGA of an electronic circuit controlling a mechanical arm
Duration: Winter 2022
For my bachelor's thesis, I designed a digital circuit for PWM control of servomotors operating a self-built mechanical arm. The project was implemented on an FPGA, enabling low-level programming of the circuit down to individual digital components such as logic gates, latches, and flip-flops.

Academic projects
Control of underactuated robots via input-constrained receding-horizon DDP
Duration: Winter 2024 - Fall 2024
We developed a receding-horizon controller based on DDP to swing up the acrobot and pendubot (two benchmark underactuated robots) enforcing hard input constraints through clamping, squashing, and constrained QP—showing the latter's superior performance. The method combines trajectory optimization with real-time feedback, using regularization to improve convergence.

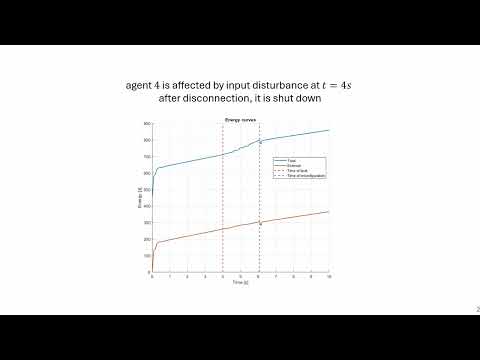
Fault-tolerant formation control of passive multi-agent systems using energy tanks
Duration: Summer 2024
I reproduced and validated a fault-tolerant formation control strategy based on passivity, energy tanks, and decentralized consensus. The system includes distributed fault diagnosis, topology reconfiguration, and a passive join mechanism to ensure stability.
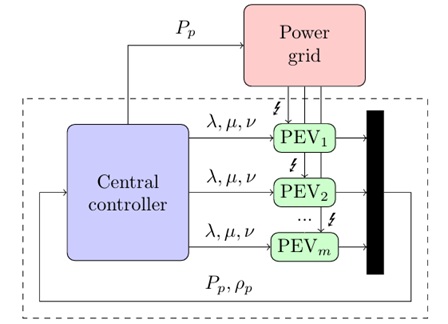
Decentralized PEV charging control based on a subgradient method for mixed-integer linear programming problems
Duration: Winter 2023 - Spring 2024
Building on recent advances in decentralized optimization, we implemented and tested a distributed MPC approach for the coordinated charging of a large fleet of plug-in electric vehicles. The final implementation enables agents to independently determine their charging profiles while collectively satisfying global power constraints.
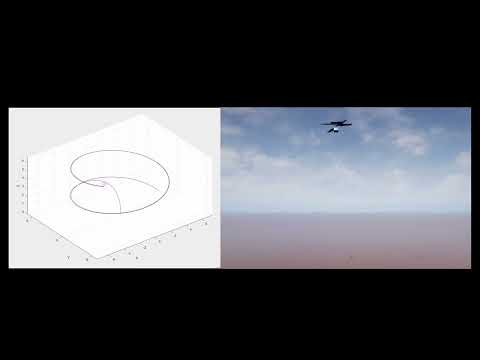
Modeling and control of the Mars helicopter 'Ingenuity'
Duration: Fall 2023 - Spring 2024
Our work group developed a detailed dynamic model of NASA's Martian helicopter Ingenuity. Building on this, we designed and tested a backstepping control law capable of stabilizing and guiding its flight, accounting for the unique aerodynamic and environmental challenges of Mars.
Control of a video-game race car using a convolutional neural network
Duration: Winter 2024
As part of a machine learning assignment, I designed, trained, and evaluated two CNNs in Keras to classify driving actions from image frames. The project focused on preprocessing, architecture design, regularization, and class reweighting to address data imbalance. The models successfully completed random tracks, demonstrating the strengths and limits of supervised learning in this context.

Self-balancing two-wheeled robot
Duration: Fall 2023 - Winter 2024
We built a two-wheeled self-balancing robot from the ground up, managing component selection, 3D printing of mechanical parts, circuit soldering, and system assembly. We then developed the control software, integrating a Kalman filter for improved state estimation.

Signal acquisition through an A/D converter
Duration: Spring 2021
To enable digital acquisition of waveforms, we built an electronic circuit composed of two main stages: a signal conditioning stage, featuring an amplifier and a Sallen-Key filter, and a data acquisition stage that utilized the A/D converter of an ATmega328p microcontroller and the UART protocol to transmit information to a PC.
Personal/extracurricular projects
This website
Duration: Spring 2025 - Present
Design and build of a tilt-tricopter VTOL UAV for SUAS Competition 2025
Duration: Fall 2024 - Present
During the 2024-2025 academic year, Sapienza Flight Team launched the VTOL aircraft project Stingray. My contribution focuses on the design of the planning and control architecture for vertical and transition flight modes, along with the development of key safety features. The system was extensively tested through software-in-the-loop simulations and numerous field experiments to ensure robust and reliable operation.
